ПИД контролер: опис, композиција, подешавање
Веома често, за системске процесе, неопходно је да контролисани параметар (на пример, температура или брзина ротације) буде у стању да одмах реагује на спољне утицаје и истовремено одржава друге вредности константи система, као што су притисак, проток, итд. систем који садржи неколико вентила за одводњавање. Да би се одржао константан, уједначен проток на сваком вентилу, притисак цевовода мора бити константан. Ако систем пумп затим погон у возилу 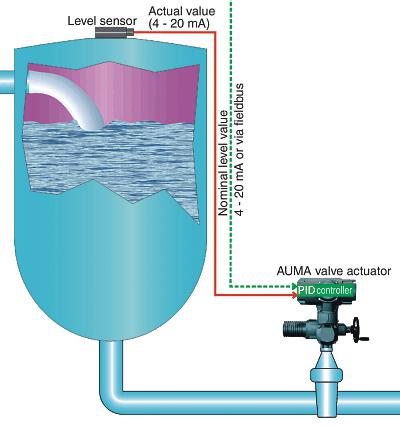 отварањем једног или више вентила, мора се повећати брзина мотора, ау случају затварања - нижа. Тако ће се одржавати константан притисак у систему. Да би се осигурао такав рад, потребан је ПИД контролер. Притисак система се мери сензором и упоређује са подешеном вредношћу. Према резултатима поређења, ПИД регулатор контролише брзину мотора. У овом чланку ћемо погледати шта чини такав уређај.
отварањем једног или више вентила, мора се повећати брзина мотора, ау случају затварања - нижа. Тако ће се одржавати константан притисак у систему. Да би се осигурао такав рад, потребан је ПИД контролер. Притисак система се мери сензором и упоређује са подешеном вредношћу. Према резултатима поређења, ПИД регулатор контролише брзину мотора. У овом чланку ћемо погледати шта чини такав уређај.
Од чега се састоји ПИД регулатор?
Да би се елиминисале грешке у систему, горе поменути уређај се састоји од три компоненте: интегралног, диференцијалног и пропорционалног регулатора. Пропорционални уређај је основни где је референца брзине пропорционална грешци. Међутим, ако се користи само ова компонента, онда ће грешка увек бити присутна у систему. Високе вредности овог уређаја доводе до флуктуација и нестабилности система, а ниске вредности - до "летаргије". За уклањање грешака користи се интегрални уређај. Брзина се повећава до тренутка елиминације грешке (са негативном грешком - смањује се). Релативно мале вредности интегралне компоненте имају значајан утицај на рад уређаја у целини. Ако је постављен превисоко, систем ће почети да ради са прекорачењем. Диференцијални уређај процењује брзину промене грешака, користи се за повећање брзине система. Међутим, како се брзина регулатора повећава, ниво прекорачења се повећава, што може довести до нестабилности система. Најчешће, ова компонента је постављена на вредност близу нуле, али може бити веома корисна у систему позиционирања. ПИД контролер је добио име по првим словима ове три компоненте. Као што се може видети из описа уређаја, важан услов за правилан рад уређаја је његово отклањање грешака. 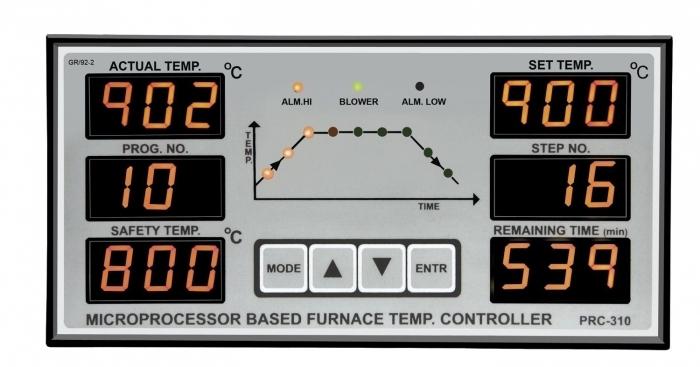
ПИД Цонтрол Сеттинг
За сваки систем, подешавање уређаја се врши појединачно, овде разматрамо основне препоруке које су заједничке за различите ситуације:
1. Поставите диференцијалне и интегралне компоненте на нулу. Подесите максималну брзину и посматрајте реакцију.
2. Повећајте пропорционалну компоненту и поновите први параграф. Наставите ову процедуру док не започне процес ауто-осцилације.
3. Смањите ову компоненту на стабилност система.
4. Поставите вредност пропорционалне компоненте на 15% испод одрживог.
5. Подесите степенасту максималну брзину променом интегралне компоненте.
6. Обично диференцијални регулатор не мора бити подешен.
7. Проверите стабилност система. 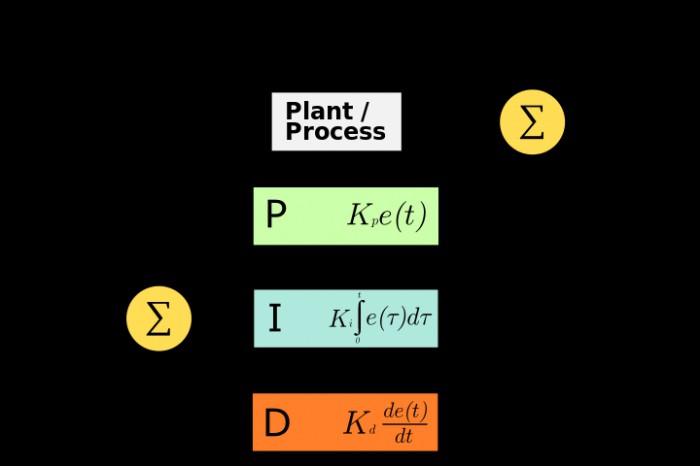
Закључак
Употреба таквих уређаја у технологији је веома широка, користе се у готово свим сферама људске активности. На пример ПИД регулатор температуре је присутан у електричном котлу или у персоналном рачунару (у ПЦ-у је потребно подесити брзину ротације вентилатора док се повећава ЦПУ температуре).