Тренутак инерције: формула. Тренутак инерције тела
Да би се променила брзина кретања тела у простору, потребно је уложити мало труда. Ова чињеница се односи на све типове механичког кретања и повезана је са присуством инерцијалних својстава објеката који имају масу. У чланку се разматра ротација тела и даје се концепт њиховог момента инерције.
Шта је ротација у смислу физике?

Одговор на ово питање може дати свима, јер се овај физички процес не разликује од његовог концепта у свакодневном животу. Процес ротације је кретање објекта са коначном масом дуж кружне стазе око неке имагинарне осе. Следећи примери ротације могу бити дати:
- Кретање точкова аутомобила или бицикла.
- Ротација лопатица хеликоптера или вентилатора.
- Кретање наше планете око осе и око Сунца.
Које физичке величине карактеришу процес ротације?
Кружно кретање описано је скупом величина у физици, од којих су главне наведене у наставку:
- р је растојање до оси материјалне тачке масе м.
- ω и α су угаона брзина и убрзање. Прва вриједност показује колико се радијана (ступњева) тијело ротира око оси у једној секунди, друга вриједност описује брзину промјене тијеком времена прве.
- Л је кутни момент, који је сличан сличној карактеристици у линеарном кретању.
- И - момент инерције тела. Ова вредност је детаљно описана у наставку.
- М је тренутак силе. Она карактерише степен промене вредности Л, ако се примењује спољашња сила.
Ове количине су међусобно повезане следећим формулама ротационог кретања:
Л = И * ω
М = И * α
Прва формула описује кружна кретања тела у одсуству дејства спољашњих момената сила. У горе наведеном облику, он одражава закон очувања угаоног момента Л. Други израз описује случај убрзања или успоравања ротације тела као резултат дејства момента силе М. Оба израза се често користе за решавање проблема динамике дуж кружне путање.
Ad
Као што се може видети из ових формула, момент инерције око осе (И) у њима се користи као одређени коефицијент. Размотримо ову вриједност детаљније.
Одакле долази вредност ја?
У овом одељку разматрамо најједноставнији пример ротације: кружно кретање материјалне тачке масе м, чија је удаљеност од осе ротације р. Ова ситуација је приказана на слици.
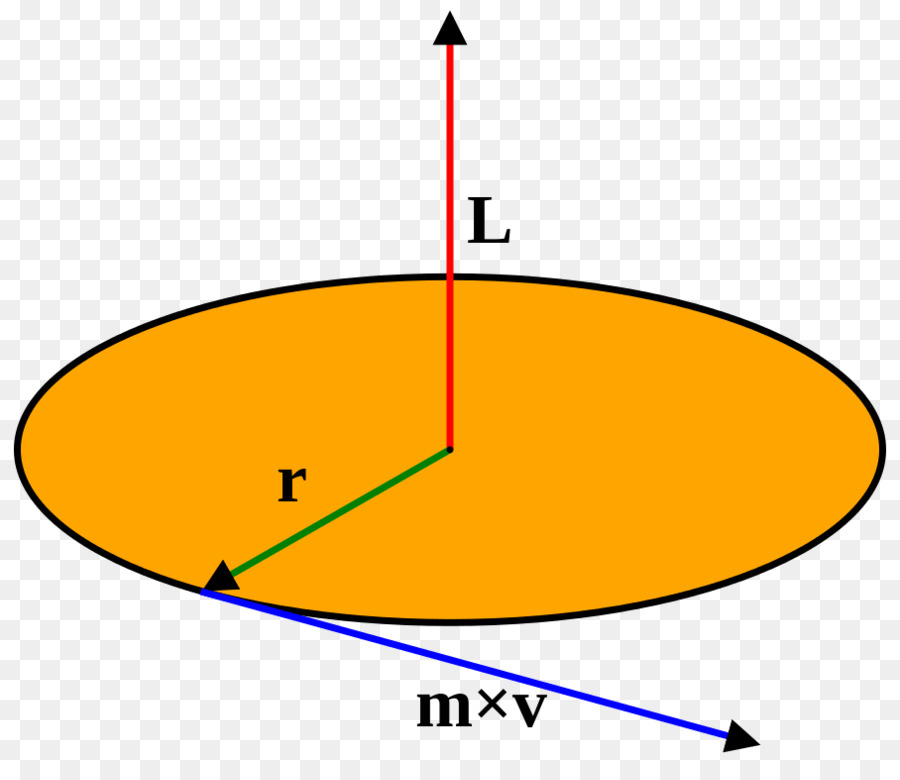
У складу са дефиницијом, угаони момент Л се записује као производ раме р линеарним импулсним п тачкама:
Л = р * п = р * м * в, с обзиром да је п = м * в
С обзиром да су линеарна и угаона брзина међусобно повезане преко удаљености р, ова једнакост се може преписати као:
в = ω * р => Л = м * р 2 * ω
Производ масе масе материјала квадратом растојања до оси ротације назива се момент инерције. Горе наведена формула ће бити прерађена у овом случају на следећи начин:
И = м * р 2 => Л = И * ω
То јест, добили смо израз који је дат у претходном параграфу и увели вредност И.
Општа формула за величину тијела И
Израз за момент инерције са масом м материјалне тачке је базичан, то јест, омогућава да се та вредност израчуна за свако тело које има произвољан облик и неједнолику дистрибуцију масе у њему. Да би се то урадило, потребно је поделити предметни предмет на мале елементе масе м и (цео број и је број елемента), а затим их помножити квадратом раздаљине р и 2 према оси око које се разматра ротација и додати резултате. Описани метод проналажења вредности И може се математички написати на следећи начин:
Ad
И = ( и (м и * р и 2 )
Ако је тело подељено на такав начин да је и-> ∞, тада је дати сума замењен интегралом над масом тела м:
И = ( м (р и 2 * дм)
Овај интеграл је еквивалентан другом интегралу у односу на запремину тела В, јер је дВ = ρ * дм:
И = ρ * ( В (р и 2 * дВ)
Све три формуле се користе за израчунавање момента инерције тела. У овом случају, у случају дискретне дистрибуције масе у систему, пожељно је користити 1. израз. Са континуираном расподелом масе, примените 3. израз.
Својства И и њено физичко значење
Описана процедура добијања општег израза за И омогућава нам да извучемо неке закључке о својствима те физичке величине:
- он је адитиван, тј. укупни моменат инерције система може се представити као збир тренутака његових појединачних делова;
- зависи од расподеле масе унутар система, као и од удаљености до осе ротације, што је последње веће, веће И;
- не зависи од сила М које дјелују на систем момената и брзине ротације ω.

Физичко значење И је колико снажно систем спречава било какву промену брзине ротације, односно момент инерције карактерише степен "глаткоће" насталих убрзања. На пример, точак бицикла се може лако окретати до великих угаоних брзина и такође га је лако зауставити, али да би се променила ротација замајца на радилици аутомобила, потребно је доста труда и времена. У првом случају постоји систем са малим моментом инерције, у другом - са великим.
Вредност И неких тела за ос ротације која пролази кроз центар масе
Ако применимо интеграцију преко волумена за сва тела са произвољном расподелом масе, онда можемо добити величину И. За хомогене објекте који имају идеалан геометријски облик, овај проблем је већ решен. Формуле за момент инерције за шипку, диск и куглу масе м, у којој је њихова конститутивна материја равномерно распоређена, дате су у наставку:
- Језгро. Оса ротације ради окомито на њу. И = м * Л 2/12, где је Л дужина штапа.
- Диск произвољне дебљине. Тренутак инерције са осом ротације који пролази окомито на његову раван кроз центар масе израчунава се на следећи начин: И = м * Р 2/2, где је Р полупречник диска.
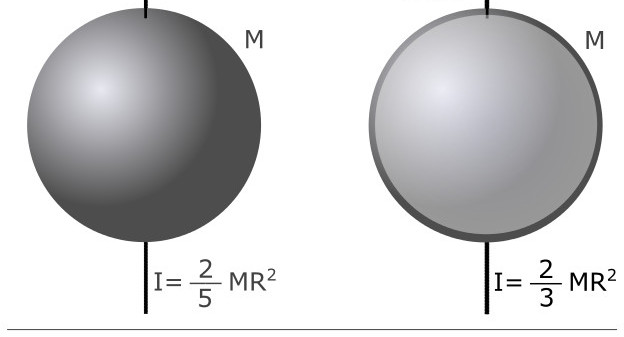
- Балл. Имајући у виду високу симетрију ове цифре, за било коју позицију оса која пролази кроз њен центар, И = 2/5 * м * Р2, овде Р је полупречник кугле.
У наставку дајемо два примера решавања проблема за примену опште формуле за израчунавање И и за коришћење својства адитивности ове величине.
Задатак израчунавања вредности И за систем са дискретном дистрибуцијом масе
Замислите шипку дугу 0,5 метра која је направљена од тврдог и лаког материјала. Ова шипка је фиксирана на оси тако да иде окомито на њу тачно у средини. На ову шипку су постављене три тежине, на следећи начин: на једној страни осовине постоје две тежине од 2 кг и 3 кг, које се налазе на растојањима од 10 цм и 20 цм од његовог краја; са друге стране, једна тежина од 1,5 кг је суспендована до краја штапа. За овај систем, потребно је израчунати момент инерције И и одредити при којој брзини ω ће се штап ротирати ако се сила од 50 Н примијени на један од његових крајева за 10 секунди.
Будући да се маса штапа може занемарити, потребно је израчунати тренутак И за свако оптерећење и додати добивене резултате како би се добио пун тренутак система. Према стању задатка, са оси тежина од 2 кг је на удаљености од 0,15 м (0,25-0,1), оптерећење од 3 кг је 0,05 м (0,25-0,20), оптерећење од 1,5 кг је 0.25 м. Користећи формулу за тренутак И материјалне тачке, добијамо:
Ad
И = И 1 + И 2 + И 3 = м 1 * р 1 2 + м 2 * р 2 2 + м 3 * р 3 2 = 2 * (0,15) 2 + 3 * (0,05) 2 + 1,5 * (0,25) 2 = 0,14 625 кг * м 2 .
Имајте на уму да су при извођењу прорачуна све јединице мјерења пребачене у систем СИ.
Да би се одредила угаона брзина ротације штапа након дејства силе, треба применити формулу са моментом силе, који је дат у другом параграфу чланка:
М = И * α
Пошто је α = Δω / Δт и М = р * Ф, где је р дужина рамена, добијамо:
р * Ф = И * Δω / Δт => Δω = р * Ф * Δт / И
С обзиром да је р = 0.25 м, замењујемо бројеве у формули, добијамо:
Δω = р * Ф * Δт / И = 0,25 * 50 * 10 / 0,14625 = 854,7 рад / с
Резултат је прилично велик. Да бисте добили уобичајену брзину, требате поделити Δω за 2 * пи радиана:
ф = Δω / (2 к пи) = 854,7 / (2 к 3,1416) = 136 с -1
Тако ће примењена сила Ф на крај штапа са утезима за 10 секунди завртети на фреквенцију од 136 обртаја у секунди.
Израчунавање вредности И за штап, када оса пролази кроз њен крај
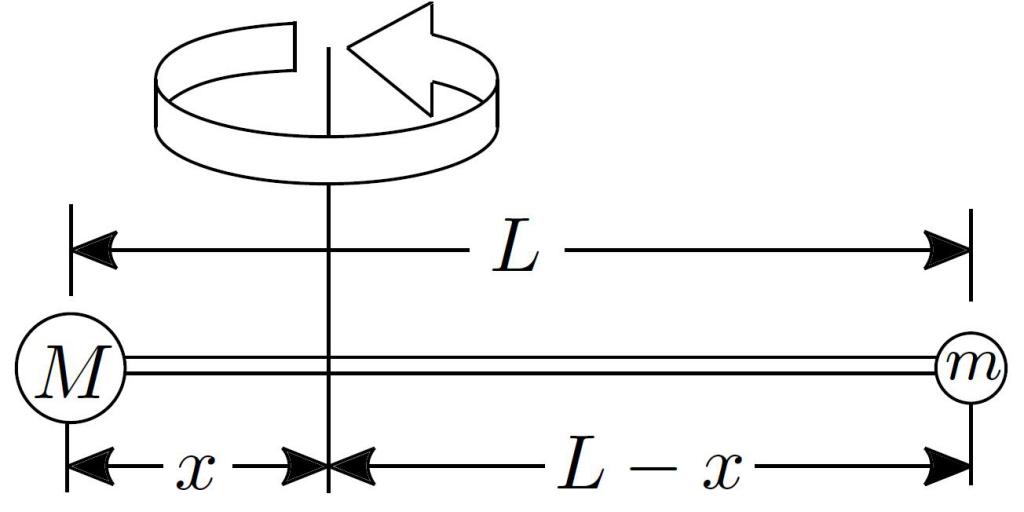
Нека буде хомогена шипка масе м и дужине Л. Неопходно је одредити момент инерције, ако се ос ротације налази на крају шипке окомите на њу.
Ad
Користимо општи израз за И:
И = ρ * ( В (р и 2 * дВ)
Разбацивањем разматраног објекта у елементарне волумене, уочавамо да се дВ може написати као др * С, гдје је С површина пресека шипке, а др је дебљина елемента цијепања. Замјењујући овај израз у формулу, имамо:
И = ρ * С * ∫ Л (р 2 * др)
Овај интеграл је прилично једноставан за израчунавање, добијамо:
И = ρ * С * (р 3/3) Л 0 Л => И = ρ * С * Л 3/3
Пошто је волумен шипке С * Л, а маса ρ * С * Л, добијамо коначну формулу:
Занимљиво је напоменути да је момент инерције за исту шипку, када оса пролази кроз њен центар масе, 4 пута мањи од добијене вриједности (м * Л 2/3 / (м * Л 2/12) = 4).